


KV-2 RC화 작업중 2탄(중간 작업)
2009-08-22, HIT: 2930
0명의 회원님이 이 작품을 좋아합니다.

dinosur



지난번 작업에 이어서 계속 진행 합니다.
리턴롤러를 개조 하였습니다. 원래는 몸체에 리턴롤러를 끼워넣는 형태이지만 이렇게 하면 가동식으로 고정할 수 없기 때문에.. 리턴롤러에 2mm 프라봉을 강력접착제로 붙입니다.
리턴롤러를 개조 하였습니다. 원래는 몸체에 리턴롤러를 끼워넣는 형태이지만 이렇게 하면 가동식으로 고정할 수 없기 때문에.. 리턴롤러에 2mm 프라봉을 강력접착제로 붙입니다.

마음에 든다면 좋아요와 댓글을 남겨 주세요. 제작자에게 많은 격려가 됩니다

원래는 이런식으로 되어 있는 부분에 리턴롤러를 끼워줍니다. 하지만 이렇게 껴 주기만 하면 리턴롤러가 자주 튀어 나가기 때문에 앞장과 같이 개조를 해 주어서 안 튀어 나가도록 고정 해 주어야 합니다. (물론 롤러는 잘 굴러가게..)

튀어나온 부분을 깨끗히 제거하고 2mm 구경으로 타공 해 줍니다. 이후 프라봉을 연결하여 개조한 리턴롤러를 끼워넣습니다. 이후 지난번 휠 고정하는 식으로 1mm로 타공하고 플라봉을 끼워넣어줍니다. (아니면 불로 달군 드라이버로 지져도 될 것 같습니다)

로드휠도 동일한 요령으로 개조 해 줍니다.

로드휠 연결부분입니다. 마찬가지로 2mm 구경으로 타공 해 줍니다.
그냥 끼워넣으면 뻑뻑하기 때문에 적당히 사포로 갈아 줍니다.
정말 쉽죠? ^^
다음으로 포탑을 개조 해 줍니다. 원래는 회전식 포탑으로 개조 해 주려고 했는데 마이크로 서보 개조 중 부품이 모자라서 (저항 2개) 일단 회전은 다음에 구현하고 포신 움직임을 구현 해 주었습니다.
그냥 끼워넣으면 뻑뻑하기 때문에 적당히 사포로 갈아 줍니다.
정말 쉽죠? ^^
다음으로 포탑을 개조 해 줍니다. 원래는 회전식 포탑으로 개조 해 주려고 했는데 마이크로 서보 개조 중 부품이 모자라서 (저항 2개) 일단 회전은 다음에 구현하고 포신 움직임을 구현 해 주었습니다.

마이크로 서보를 강력 접착제 같은 것으로 포탑에 고정합니다. 그 다음 포신과 마이크로 서보를 끈으로 팽팽하게 연결하는데 이런방식을 풀-풀(Pull-Pull) 방식 이라고 합니다. 방법은 포신의 만텔 부분에 타공을 해서 서버와 끈으로 연결 해 줍니다. (사람의 근육을 생각하시면 됩니다) 간단한 구조는 위의 작은 그림과 같습니다.
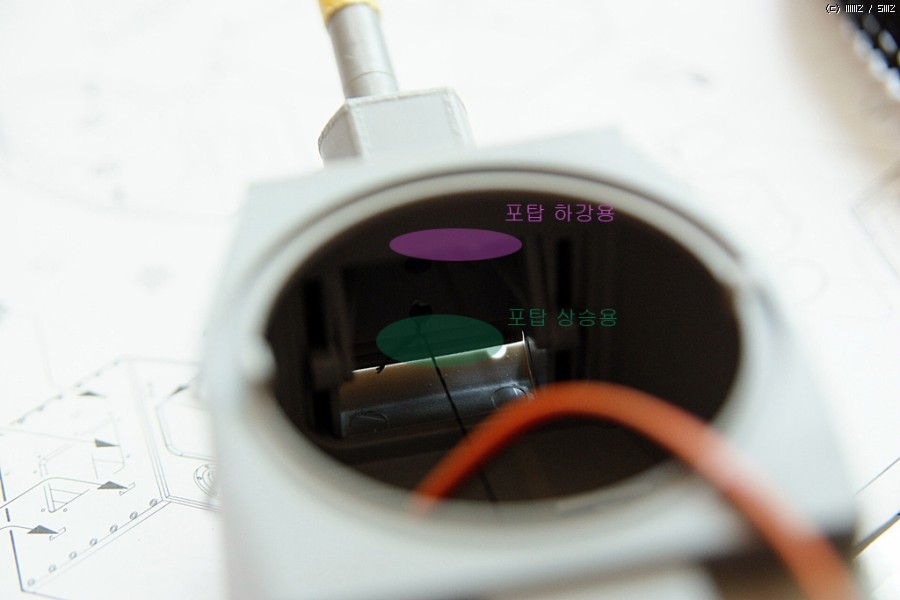
만텔 안쪽에 타공하고 서버와 끈으로 연결 해 준 사진입니다. 보라부분은 하강용, 녹색 부분은 상승용 입니다. 이렇게 해서 간단하게 포신 상승/하강 개조가 끝났습니다.
정말 쉽죠? 누구나 할 수 있습니다. ;-)
정말 쉽죠? 누구나 할 수 있습니다. ;-)
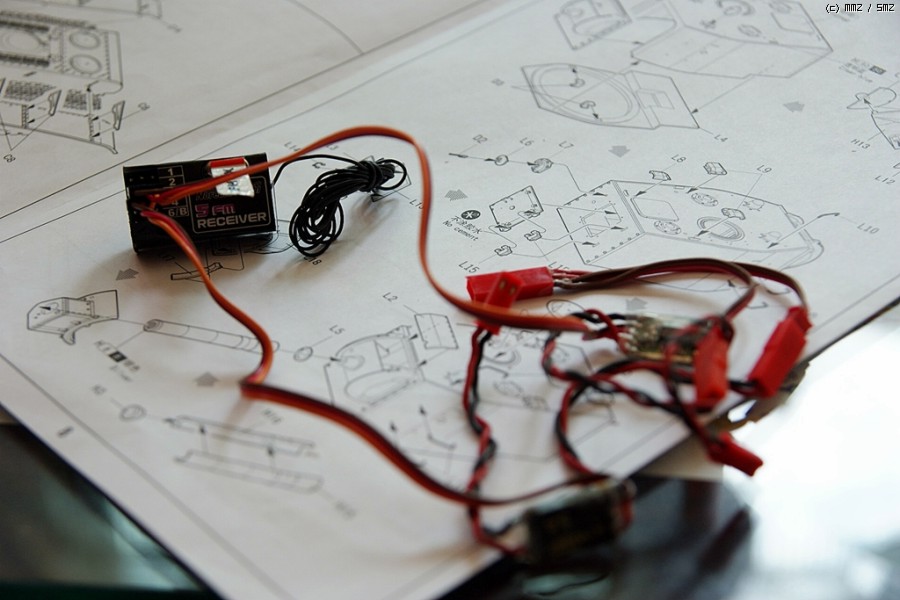
모터 제어를 위한 RC 부품 부분입니다. 5채널 수신기 + 모터 구동용 ESC(Electric Speed Controller) 2개 입니다.
수신기에서 나오는 출력은 +, -, PWM 신호 이렇게 3개가 나오기 때문에 수신기에서 DC 모터를 바로 연결할 수 있는 방법은 없습니다. (수신기 출력은 3개고 모터 입력은 2개지요.)
수신기에서 나오는 출력은 +, -, PWM 신호 이렇게 3개가 나오기 때문에 수신기에서 DC 모터를 바로 연결할 수 있는 방법은 없습니다. (수신기 출력은 3개고 모터 입력은 2개지요.)
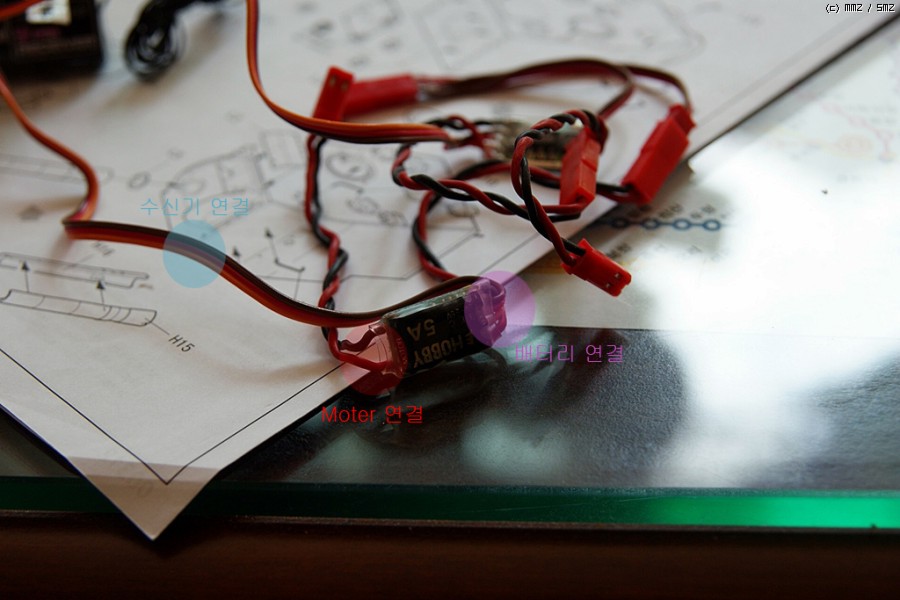
사진에 나온 것이 ESC로써 DC 모터를 구동시키기 위한 핵심부라고 할 수 있는데요.. BEC(Battery Elimination Circuit)가 포함된 ESC를 구하셔야 합니다. BEC만 따로 또 구하면 비용도 비용이거니와 모델이 1/35이기 때문에 공간이 협소해서 모두 집어넣기 힘들어집니다. ESC는 RC 부품을 파는 하X전자 같은 온라인샵에서 "전자변속기"로 찾으시면 됩니다. (이런.. Motor를 Moter라고 써 놨군요 오타 입니다. -_-;) ESC 구성은 사진과 같고 각 색깔로 표시된 것과 같이 수신기, 모터, 배터리와 연결 해 줍니다. 각각 모터 1개씩에 연결 되므로 총 2개가 필요 합니다.
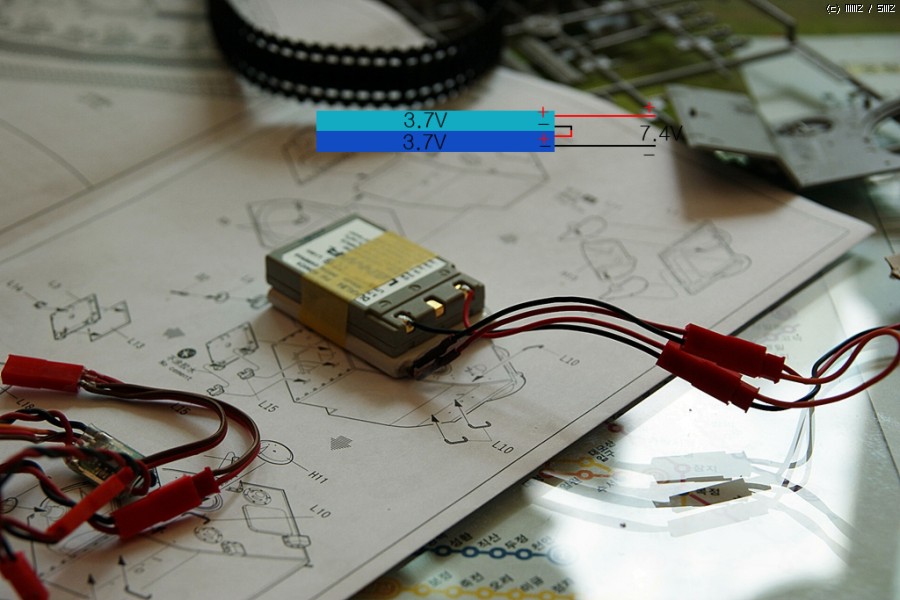
모터를 구동시키기 위한 배터리 입니다. 7.4V 배터리를 사면 좋지만 충전기 비용도 만만치 않고 배터리 자체 크기도 크거니와 비싸기 때문에.. ㅠ.ㅠ 저렴하고 구하기 쉬운 3.7V 리튬폴리머 전지를 2개 구해서 그림과 같이 직렬로 연결 해 줍니다. (충전기도 쌉니다)
7.4V 로 만든 이유는 수신기를 구동시키기 위한 최소 입력 전원은 5V 이상이어야 하고 ESC는 7V 이상의 입력을 사용하기 때문입니다. 물론 ESC의 spec에 따라 입력전원은 다 다르지만..제가 사용하는 마이크로 ESC는 7 ~ 11V까지 사용 합니다.
ESC에 BEC가 포함 되어 있는경우 ESC가 수신기에 5V를 알아서 공급 해 주기 때문에 BEC를 이용하여 수신기에 따로 전원을 안 넣어줘도 됩니다.
7.4V 로 만든 이유는 수신기를 구동시키기 위한 최소 입력 전원은 5V 이상이어야 하고 ESC는 7V 이상의 입력을 사용하기 때문입니다. 물론 ESC의 spec에 따라 입력전원은 다 다르지만..제가 사용하는 마이크로 ESC는 7 ~ 11V까지 사용 합니다.
ESC에 BEC가 포함 되어 있는경우 ESC가 수신기에 5V를 알아서 공급 해 주기 때문에 BEC를 이용하여 수신기에 따로 전원을 안 넣어줘도 됩니다.

제가 사용하는 4채널 노루마치 송신기 입니다. (가격대비 성능 좋습니다) 각 색으로 구분 된 것이 바로 채널로써 붉은 색인 우측 스틱을 좌우로 움직이는 것이 1채널, 상하가 2채널이고 이런식으로 3채널 4채널이 됩니다. (사진을 참조하세요)
아까 ESC를 수신기에 연결할 때 2채널과 3채널에 연결하면 두 스틱을 앞으로 밀면 동시에 모터가 앞으로 가고 뒤로 동시에 당기면 뒤로 가는 식 입니다. 좌우 스틱을 반대로 움직이면 모터가 서로 다른 방향으로 돌기 때문에 탱크 방향 전환이 되겠죠. 이런식으로 초신지 기동도 됩니다 ^^; 아참 저 조정기는 스틱 미세 조절 기능이 있기 때문에 의도하지 않게(?!) 비례제어도 됩니다. 우왕 굿 ^.^b
참 쉽죠? :-)
아까 ESC를 수신기에 연결할 때 2채널과 3채널에 연결하면 두 스틱을 앞으로 밀면 동시에 모터가 앞으로 가고 뒤로 동시에 당기면 뒤로 가는 식 입니다. 좌우 스틱을 반대로 움직이면 모터가 서로 다른 방향으로 돌기 때문에 탱크 방향 전환이 되겠죠. 이런식으로 초신지 기동도 됩니다 ^^; 아참 저 조정기는 스틱 미세 조절 기능이 있기 때문에 의도하지 않게(?!) 비례제어도 됩니다. 우왕 굿 ^.^b
참 쉽죠? :-)
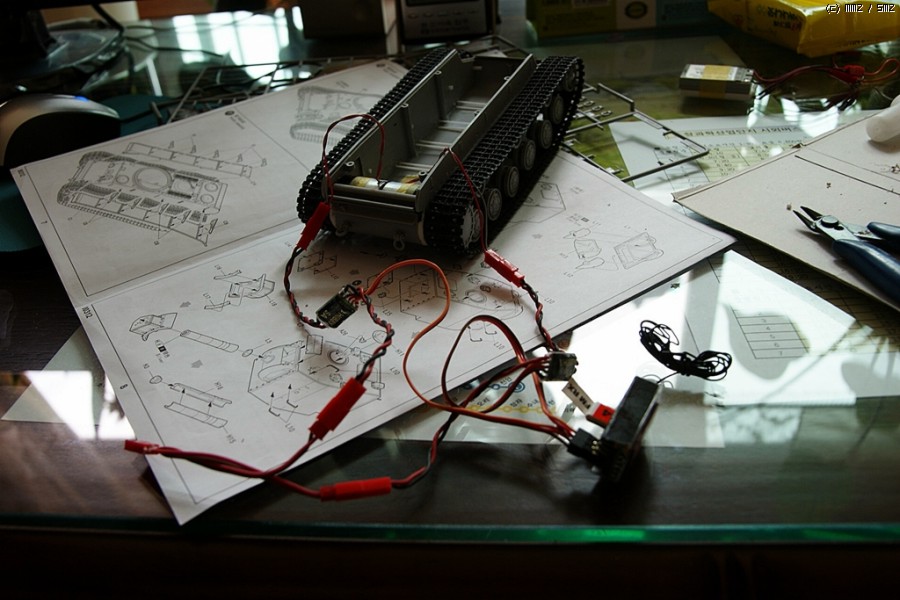
수신기, ESC 2개, DC모터 2개를 연결한 사진 입니다. ESC를 수신기의 채널 출력에 연결 해 주어야 하는데 이때 어느 위치에 연결할 것인지는 앞장의 조정기를 보셨으면 이해하기 쉬우실 겁니다. 이제 이걸 전부 탱크에 잘 넣어줍니다.

중간 완성 된 KV-2 입니다. 주행 잘 되고 포신 상하 구동 잘 됩니다. 참 쉽죠? ;-D
http://dinosur.egloos.com/3057302 뜻하지 않게 제 블로그 광고가 ㅤㄷㅚㅆ군요.. -ㅁ-; 일단 여기에 시험 주행 영상도 올려놨습니다. 아직 손 볼곳이 좀 있군요..
이제 반절정도 완성 되었네요.. 아직 갈 길이 멉니다~
http://dinosur.egloos.com/3057302 뜻하지 않게 제 블로그 광고가 ㅤㄷㅚㅆ군요.. -ㅁ-; 일단 여기에 시험 주행 영상도 올려놨습니다. 아직 손 볼곳이 좀 있군요..
이제 반절정도 완성 되었네요.. 아직 갈 길이 멉니다~
마음에 든다면 좋아요와 댓글을 남겨 주세요. 제작자에게 많은 격려가 됩니다














